









下面我们先来介绍下无人机飞丢的几种原因:
1、返航点跳变
使用无人机执行任务时,APP里面忽然提示返航点刷新,如果点击一键返航,无人机会向新的返航点飞行导致飞丢(这也是我们俗称的一键放生)。

这种情况为防止飞丢,在点击一键返航后,看地图发现无人机返航时不是向自己的地方飞行,要立马取消并手动操控飞机返航(同时提醒诸位机友,在飞机执行任务前做好飞行检查并刷新返航点)。
2、飞行撞击
无人机在执行任务飞行时撞山、撞电线。这种情况是可以避免的。在起飞前,根据附近的障碍物,规划好飞行航线,同时观察好飞行高度,在满足需求的情况下尽量飞高一些。

如果是超视距,尽量让无人机向前飞行以便于观察飞行前进方向是否有障碍物。在飞行环境比较复杂的情况下,执行任务时飞行速度慢一点,否则看到障碍物后也来不及避开。
3、返航撞击
这种情况不同于飞行撞击,若无人机飞到丢失信号(图传丢失,遥控信号丢失)后会触发返航,如果设置的返航高度不足,无人机在返航时极易发生撞击。

因此,在起飞前,观察周围飞行环境,若有高楼或者山,建议设置更高的返航高度(返航高度超过附近最高建筑物)。
4、电量不足
电量不足,飞行时间变短,飞太远自然也就会飞丢了。因此要计算好电量,不要飞太远

同时无人机会自算电量,若电量非常低,无人机就会强制下降了,如果提示返航,建议新手及时返航,但是如果飞太远的话,可能在返航的过程中电量不足自动降落了。
5、风大飞丢
在飞行环境中,一般高度越高,风力就越大,导致无人机向一个方向飘,这种情况可能就会飞丢了。可以通过app里面无人机的姿态球来查看,悬停时,姿态球是跟地面平行,若在悬停时姿态球发现无人机的角度有异常,那就说明风力比较大把无人机吹至倾斜。

防止被风吹丢,要先观察姿态球,发现无人机受风的影响时,先降低高度(切勿直接一键返航),然后再手动或者直接一键返航,同时建议不要在5级风以上进行飞行。
6、信号丢失
无人机信号丢失。例如:想在桥上操作穿桥的话,桥面会遮挡遥控信号和图传信号,如果是图传信号或者遥控信号丢失,这种情况还可以挽救,飞过了桥就可以。
但是如果同时又丢失了GPS信号,无人机就会直接下降到水面。

7、姿态模式
一般情况下无人机作业主要依靠的是GPS来定位,相当于给无人机加装了导航功能。

但是如果周围GPS信号弱或者没有等到无人机搜索到足够的GPS信号,无人机会自动切换成姿态模式,姿态模式下无人机没有定位功能,就好像人蒙住了眼睛,姿态模式下是不建议飞行,因为这种情况极易飞丢飞机。
那么我们又该如何找回飞丢的无人机呢?
方法一
第一步,打开飞行软件,在主界面点击左上角这个图标,可以查看飞行记录。

然后在众多飞行记录里,我们找到最后一条飞行记录。
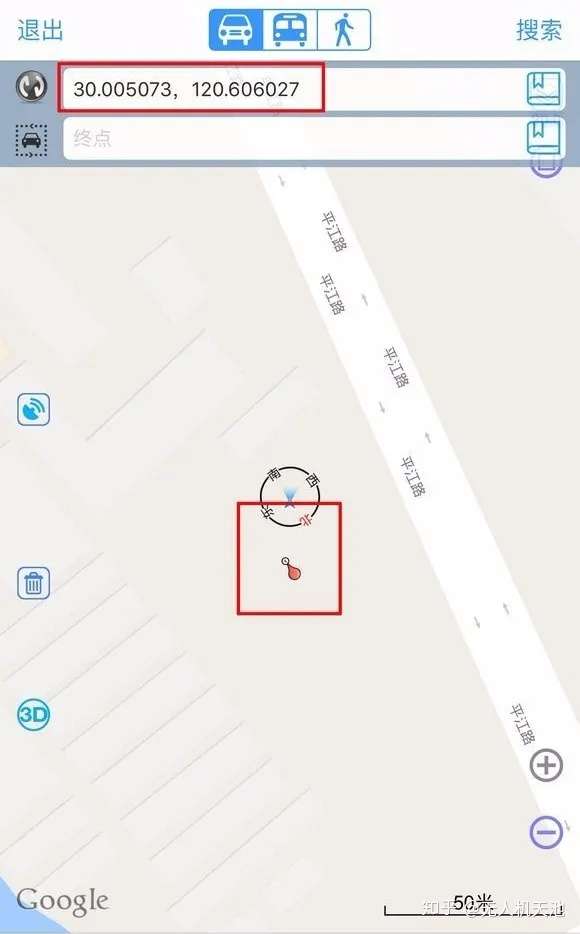
点击飞行记录进入查看,直接把进度条拖到最后面。查看飞行器最后时刻的坐标。
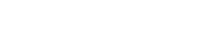
然后在工具里输入这个坐标,建议用奥维浏览器,地图上的红点就是我们的飞行器位置了。
根据导航过去,一般就能找到丢失的无人机了。
方法二
打开DJIGO4软件,右上角里面有一个找飞机的功能,打开后人的位置在一个蓝点,无人机的位置在一个圆圈点,根据地图导航过去,你就可以大概找到丢失的无人机了。




DJIGO4找飞机功能步骤
除了这两种常见的办法可以找回飞丢无人机外,还有多种方法,欢迎大家留言讨论,我们的抖音视频里面有详细有趣的关于找回飞丢无人机的过程哦!
(部分图源自网络,如有侵权,请告知删除)



